雷霆官网
前言
雷霆系列产品介绍
产品使用警告事项
产品使用注意事项
TBot-I控制器介绍
TBot-I多程序选择功能介绍
TBot-I接口引脚定义
传感器介绍
超声波传感器
颜色传感器
巡线传感器
触碰传感器
彩色传感器
火焰传感器
声音强度传感器
人体红外传感器
环境温湿度传感器
液体温度传感器
土壤湿度传感器
气体浓度传感器
执行模块介绍
中型电机(编码电机)
小型电机(风扇模块)
舵机
LED显示屏
通信模块介绍
多机通信模块
蓝牙遥控手柄
雷霆系列产品声音文件清单
雷霆系列产品屏幕显示图案清单
雷霆系列产品零部件清单
Scratch积木编程
使用注意事项
安装使用指导
主界面导航
菜单栏
“编程切换”菜单
“文件”菜单
“程序”菜单
“工具”菜单
“帮助”菜单
编程模块区
控制积木
运动积木
中型电机
小型电机
舵机
显示积木
LED显示屏
触碰LED灯
声音积木
传感器积木
超声波传感器
火焰传感器
土壤湿度传感器
气体浓度传感器
声音强度传感器
液体温度传感器
人体红外传感器
环境温湿度传感器
中型电机数据
彩色传感器
触碰传感器
定时器
六轴传感器
电子罗盘
巡线传感器
颜色传感器
数据操作积木
变量积木
函数积木
通信积木
蓝牙通信
多机通信
比赛专用程序
编程操作区功能介绍
C++编程(Arduino C)
初识Tbot-I C++编程
声音播放
屏幕显示
LED点阵显示
彩灯条显示
电机转动
编码电机转动
舵机转动
小型电机转动
电机扩展转动
传感器
红外传感器
超声波传感器
触碰传感器
巡线传感器
颜色传感器
光线传感器
彩色传感器
电子罗盘
火焰传感器
空气温湿度传感器
液体温度传感器
土壤湿度传感器
气体浓度传感器
声音强度传感器
人体红外传感器
六轴传感器
通信
蓝牙通信
多机通信
系统
计时器
多程序编程
多任务编程
Python编程
初识Tbot-I Python编程
声音播放
屏幕显示
LED点阵显示
彩灯条显示
电机转动
编码电机转动
舵机转动
舵机扩展模块
小型电机转动
电机扩展模块
电机扩展模块_
传感器
红外传感器
超声波传感器
触碰传感器
巡线传感器
颜色传感器
光线传感器
彩色传感器
电子罗盘
火焰传感器
空气温湿度传感器
液体温度传感器
土壤湿度传感器
气体浓度传感器
声音强度传感器
人体红外传感器
姿态传感器
摩图AI模块
通信
蓝牙通信
多机通信
系统
计时器
多程序编程
多任务编程
隐私政策
本书使用 GitBook 发布
颜色传感器
颜色传感器
获取颜色传感器()的值
获取颜色传感器识别到的8种颜色的ID值,取值范围为0/1/2/3/4/5/6/7。
颜色传感器能识别以下8种颜色,对应数值如下:
颜色
无颜色
红色
黄色
绿色
蓝色
棕色
白色
黑色
数值
0
1
2
3
4
5
6
7
示例:
机器人程序启动后,屏幕实时显示颜色传感器识别到的颜色值。
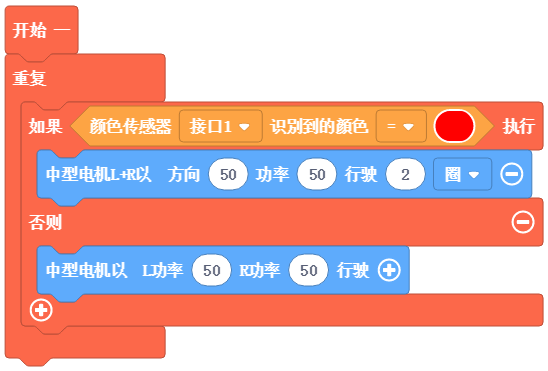
颜色传感器()识别到的颜色()()
判断颜色超感器识别到指定颜色,条件是否为真。
示例:
机器人程序启动后,机器人以50%功率持续向前行驶,一旦颜色传感器检测到红色,机器人向右转弯,否则一直向前行驶。
results matching "
"
No results matching "
"