舵机
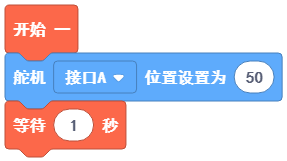
舵机()位置设置为()
使舵机A或者B 转动到指定位置,位置值取值范围为-100到100,数值代表最大行程的百分比;其中0代表舵机上电后的复位位置,也是舵机整个行程的正中间位置(中位);1到100代表舵机正向从中位转动到行程的上限;-1到-100代表舵机反向从中位转动到行程的下限。
示例:
机器人程序启动后,舵机A正向转到行程最上限位置。
舵机()最高限位()最低限位()中间位置()
设置舵机A、B行程的最高限位、最低限位、中间位置。其中数值代表舵机最大行程的百分比,正值代表舵机从上电复位位置正转,负值代表舵机从上电复位位置反转。最高限位、最低限位取值为:-100~100,并且最低限位要小于最高限位。中位位置取值范围为:舵机最低限位值~舵机最高限位值。
注:舵机限位自定义以后,舵机转动位置设置是相对于自定义的限位位置而言的。
示例:
机器人程序启动后,定义舵机A最高限位为舵机正向转动最大行程的50%,最低限位为舵机反向转动最大行程的50%。舵机A转到定义的最高限位行程的50%的位置。