中型电机
中型电机以L功率()R功率()行驶+
用法一:

中型电机以L功率()R功率()行驶
用法二:

中型电机以L功率()R功率()行驶()(圈、度、秒)
中型电机L、R以指定功率值行驶,可指定行驶圈数、角度、时间。功率值取值范围为-100到100,数值代表最大功率的百分比。其中0代表轮子不动,1到100代表电机正向转动功率从最小到最大,-1到-100代表电机反向转动功率从最小到最大。
注:当设置指定圈数并且设置L、R功率值大小不相等时,指定的圈数条件是以功率值大的电机为准。
示例1:
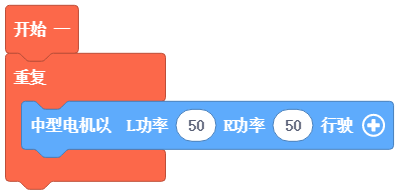
机器人程序启动后,机器人以L、R中型电机50%功率向前持续行驶。
注意:此语句是非阻塞型语句,使用时必须外加循环或者下方加阻塞型语句(例如:延时等待语句)。
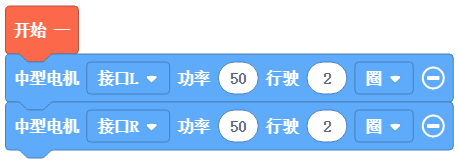
示例2:
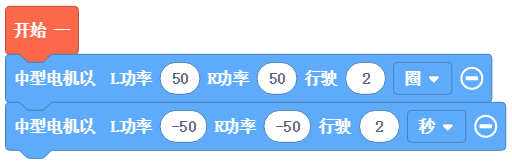
机器人程序启动后,机器人以L、R中型电机50%功率向前行驶2圈,然后以同样大小功率持续2秒向后行驶。
中型电机L+R以方向()功率()行驶+
用法一:

中型电机以L功率()R功率()行驶
用法二:

中型电机以L功率()R功率()行驶()(圈、度、秒)
此语句可以直接设置整体构型运动轨迹方向。中型电机L+R模式以指定方向、指定功率值行驶,可添加指定行驶圈数、角度、时间。
- 方向取值范围为-100到100,数值大小代表转向程度大小。其中0代表直行,1到100代表向右转弯,转向程度由最小到最大,-1到-100代表向左转弯,转向程度由最小到最大。
例如:方向0代表直行;100代表原地向右转向;-50代表内侧轮不动、外侧轮转动向左转向。 - 功率值取值范围为-100到100,其中0代表轮子不动,1到100代表电机正向转动功率从最小到最大,-1到-100代表电机反向转动功率从最小到最大。
示例1:
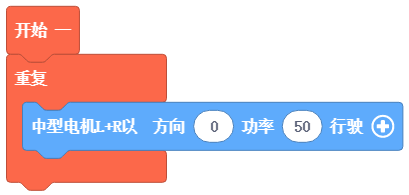
机器人程序启动后,机器人以L+R中型电机50%功率向前持续行驶。
注意:此语句不加行驶圈数、角度、时间时是非阻塞型语句,使用时必须外加循环。
示例2:
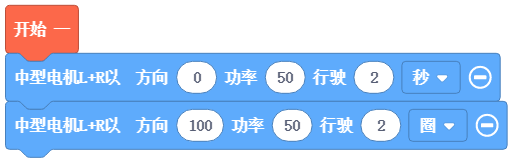
机器人程序启动后,机器人以L+R中型电机50%功率向前行驶持续2秒,然后以同样大小功率原地向右转2圈。
中型电机()功率()行驶+
用法一:
中型电机()功率()行驶

用法二:
中型电机(接口L、接口R)功率()行驶()(圈、度、秒)

中型电机L或者R以指定功率值行驶,可指定行驶圈数、角度、时间。功率值取值范围为-100到100,数值代表最大功率的百分比。其中0代表轮子不动,1到100代表电机正向转动功率从最小到最大,-1到-100代表电机反向转动功率从最小到最大。
示例1:

机器人程序启动后,机器人以中型电机L功率50%持续原地右转。
注意:此语句不加行驶圈数、角度、时间时是非阻塞型语句,使用时必须外加循环。
示例2:
机器人程序启动后,机器人以中型电机L功率50%原地右转2圈,以中型电机R功率50%原地左转2圈。
中型电机()()停止

中型电机L或者R或者L+R,设置其立即刹车或者惯性滑行停止。
示例:

机器人程序启动后,机器人以L、R中型电机50%功率向前行驶2圈后立即刹车停止。
重置中型电机()
将电机内的霍尔传感器获取的旋转量(圈数或角度)重置为零,重置后从此位置重新计数; 此语句仅影响电机霍尔传感器的读数,不会影响电机的功率级别或位置。
示例:
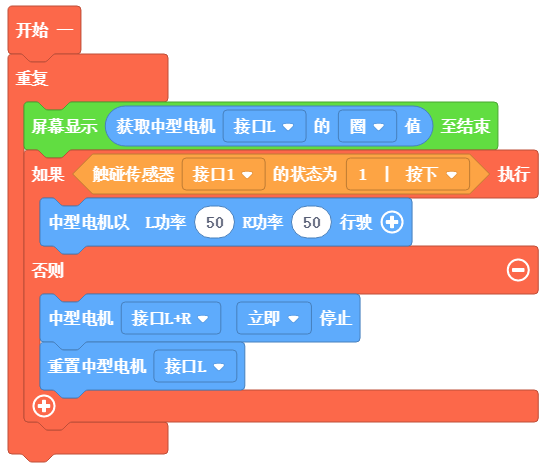
机器人程序启动后,如果触碰传感器按键为按下状态,机器人则以50%电机功率向前行驶,屏幕实时显示机器人前进的圈数值,松开按键机器人停止并且圈数值清零,以上可循环进行。