数据操作积木
()(逻辑关系)()

示例:

机器人程序启动后,当机器人探测到前方距离30厘米范围内有障碍物时就持续右转,否则就持续向前行驶。
()(与、或)()

()与():判断指定的两个条件同时成立,是否为真。 ()或():判断指定的两个条件其中一个成立,是否为真。
示例:
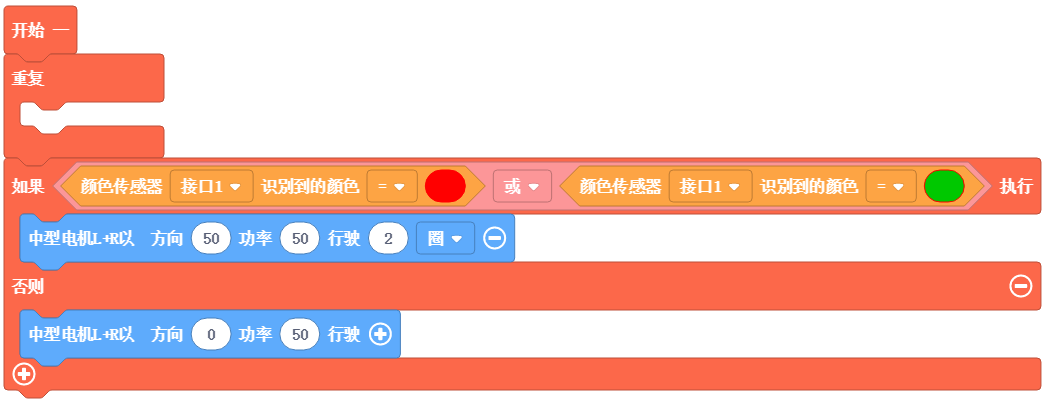
机器人程序启动后,当机器人识别到红色或者绿色就右转,否则就持续向前行驶。
非()

判断指定条件取反后的条件是否为真。
示例:
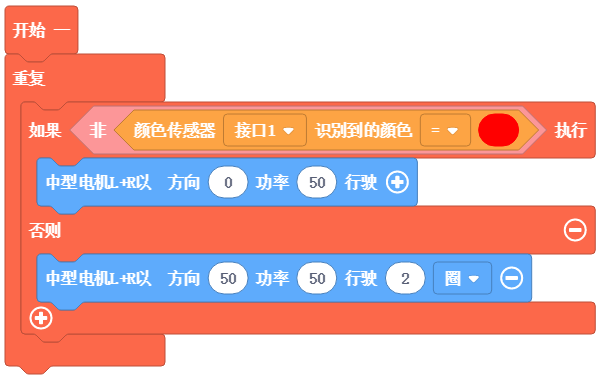
机器人程序启动后,当机器人没识别到红色就持续向前行驶,识别到红色就右转,以此循环。
(数值)

指定数值,输入可以是数字、变量或者指定条件的数值。
示例:

机器人程序启动后,机器人以L、R中型电机50%功率向前行驶机器人获取到的颜色数值的圈数。
()算术运算()

数值与数值的算术运算,包括:“+”、“-”、“*”、“/”。输入可以是数字、变量或者指定条件的数值。
示例:

机器人程序启动后,机器人以L、R中型电机50%功率向前行驶机器人获取到的颜色数值的10倍的圈数。
从()到()的随机数

在指定区间内取随机数。输入可以是数字、变量或者指定条件的数值。
示例:

机器人程序启动后,机器人屏幕显示表情,持续时间为3到8之间的随机数秒。
()的绝对值

指定数值取绝对值。输入可以是数字、变量或者指定条件的数值。
示例:
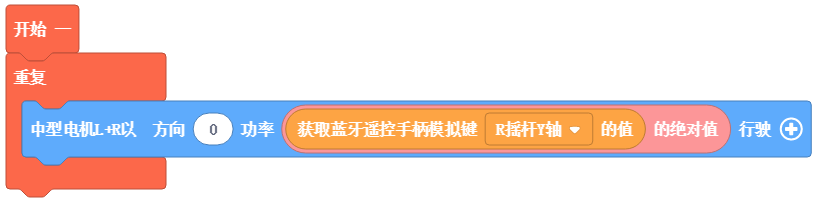
机器人程序启动后,机器人持续向前行驶,用蓝牙遥控手柄R遥杆Y轴上、下方向控制行驶功率,功率始终为正值(即机器人始终往前走)。
四舍五入()

取指定数值四舍五入的值。输入可以是数字、变量或者指定条件的数值。
示例:
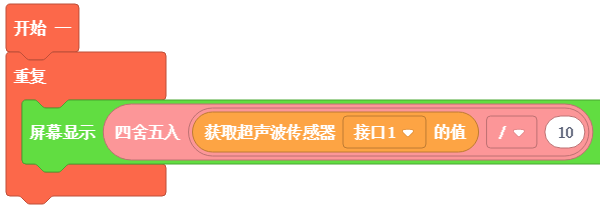
机器人程序启动后,屏幕实时显示超声波与前方障碍物距离除以10以后的四舍五入值。
三角函数()

对指定数值进行三角函数计算,包括:sin、cos、tan、asin、acos、atan 。输入可以是数字、变量或者指定条件的数值。
示例:
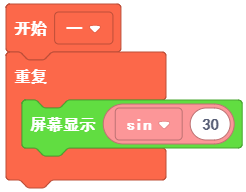
机器人程序启动后,屏幕显示sin30°的值。
指数()

对指定数值进行指数计算,包括:平方根、In、log10、e^、10^。输入可以是数字、变量或者指定条件的数值。
示例:
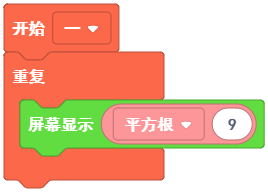
机器人程序启动后,屏幕显示9的平方根的值。